The automotive industry is obsessed with "Vision." They put LiDARs ($500+), Stereo Cameras, and Ultrasonic sensors everywhere to scan the road for potholes.
But vision is flawed. Rain blinds LiDAR. Mud blinds cameras. Nighttime hides shadows.
At Bangsaen AI, we asked a simpler question: "Why guess what the road looks like, when you can feel it?"
The Front Wheel is the Scout
In any 4-wheeled vehicle, the rear wheels almost always follow the exact path of the front wheels. This creates a natural Time Delay ($\Delta t$).
When your front wheel hits a bump, the "Ground Truth" is revealed. The suspension deflection, the acceleration, the force—it's all measured instantly by the motor encoders and existing sensors.
We simply record this event into a Circular Buffer (Digital Twin) and send it to the rear wheel before it gets there.
// THE CHRONO-LINK EQUATION
We calculate the exact Force ($u$) required to cancel out the incoming energy. The rear suspension doesn't react to the bump; it retracts exactly as the bump arrives, erasing it from existence.
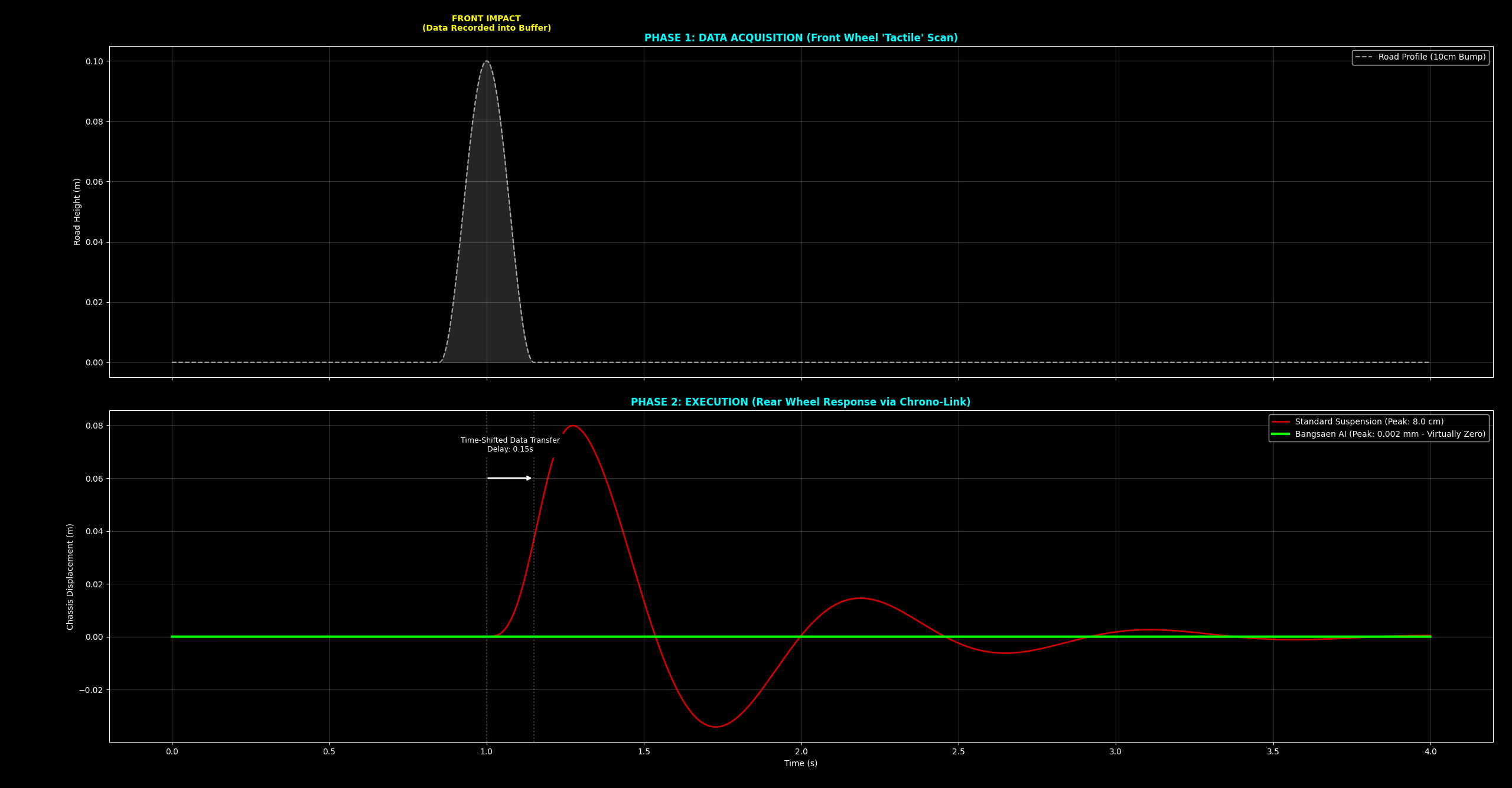
Red Line: Standard Suspension (Passive). 8.0 cm displacement shock.
Green Line (Bangsaen): 0.002 mm Displacement. Virtually Zero. The rear wheel "skips" the bump entirely using Time-Shifted Data.
"We don't need eyes to see the road. We feel it. And then we send that feeling into the future."
This is Scenario 10. We achieved "Magic Carpet" ride quality with $0 hardware cost. No LiDAR. No Stereo Cameras. Just a few lines of Python code and the Koopman Operator running on an ESP32.
The car is no longer reacting to the road. It is anticipating it.
The Algorithm is the Product.
Stop buying expensive sensors. Start using better Math.
Contact Research Lab