Weight is the enemy of agility. Modern EVs are heavy—often exceeding 2.5 tons due to massive battery packs.
When a heavy object tries to turn at high speed, Inertia wants it to keep going straight. This is called "Understeer." The standard industry solution? Apply the brakes on the inner wheel. This is clumsy, wasteful, and slow.
The Solution: The Virtual Wheelbase
At Bangsaen AI, we don't use brakes to turn. We use Moment Injection.
By applying a precise positive torque to the outer wheel and negative torque to the inner wheel, we generate a Yaw Moment ($M_z$) that physically rotates the car into the corner. It feels like the wheelbase shrinks by 1 meter instantly.
// THE INVERSE DYNAMICS EQUATION
We solve this Inverse Problem in real-time. By predicting the tire forces ($F_y$) required to hold the line, we inject the exact $M_z$ needed to cancel out the centrifugal inertia.
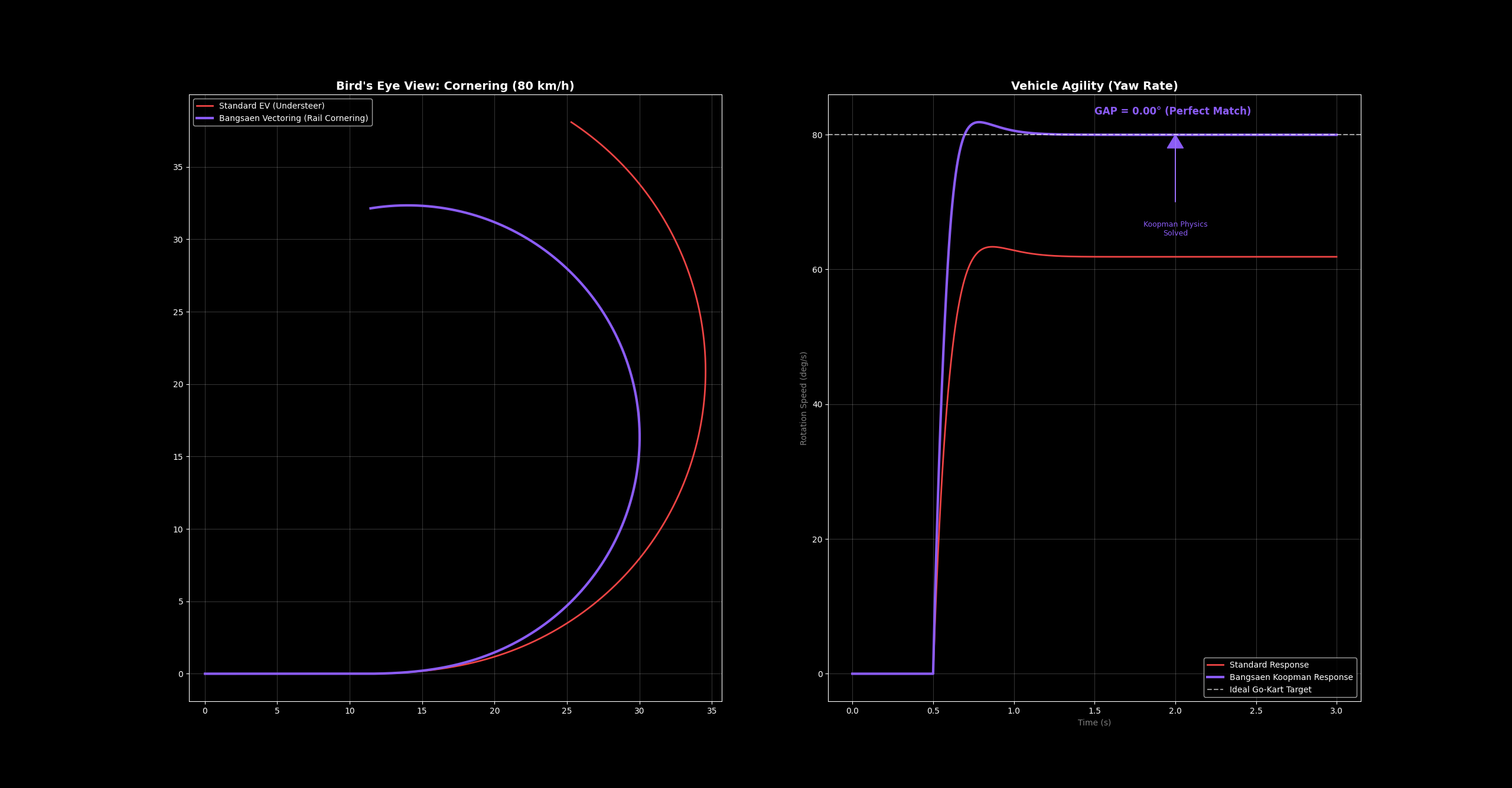
Red Line (Standard): Heavy Understeer. The car drifts wide due to mass.
Purple Line (Bangsaen): Rail Cornering. The car hugs the inside line as if it weighs nothing. Note the Yaw Rate gap is 0.00°.
"We don't force the car to turn. We convince the physics that the car is already turning."
Look at the graph on the right. The Standard EV (Red) lags behind the target, struggling against its own weight. The Bangsaen Core (Purple) snaps to the target instantly. The gap is gone. This is the difference between driving a bus and driving a guided missile.
The Algorithm is the Product.
Hardware is a commodity. Control logic is the competitive advantage.
Contact Research Lab