Power is nothing without control. Traditional Traction Control Systems (TCS) are fundamentally broken because they are Reactive.
When a wheel hits ice, it spins. The standard ECU panics, cuts the torque to zero (the "head-nod" effect), and then slowly reapplies power until it slips again. This creates a violent "Sawtooth" profile of acceleration—wasting momentum, time, and passenger comfort.
The Solution: The Friction Oracle
Bangsaen AI does not wait for the slip. We estimate the Maximum Friction Coefficient ($\mu_{max}$) of the surface in real-time using the Koopman Operator.
Instead of cutting power after a slip, we clamp the motor torque exactly at the Physics Limit. We don't punish the engine; we optimize it.
// THE OPTIMAL TORQUE EQUATION
Where $\mu_{est}$ is derived from the Latent Physics Manifold of the wheel dynamics, ensuring $ Slip \approx 0 $ while maintaining maximum thrust.
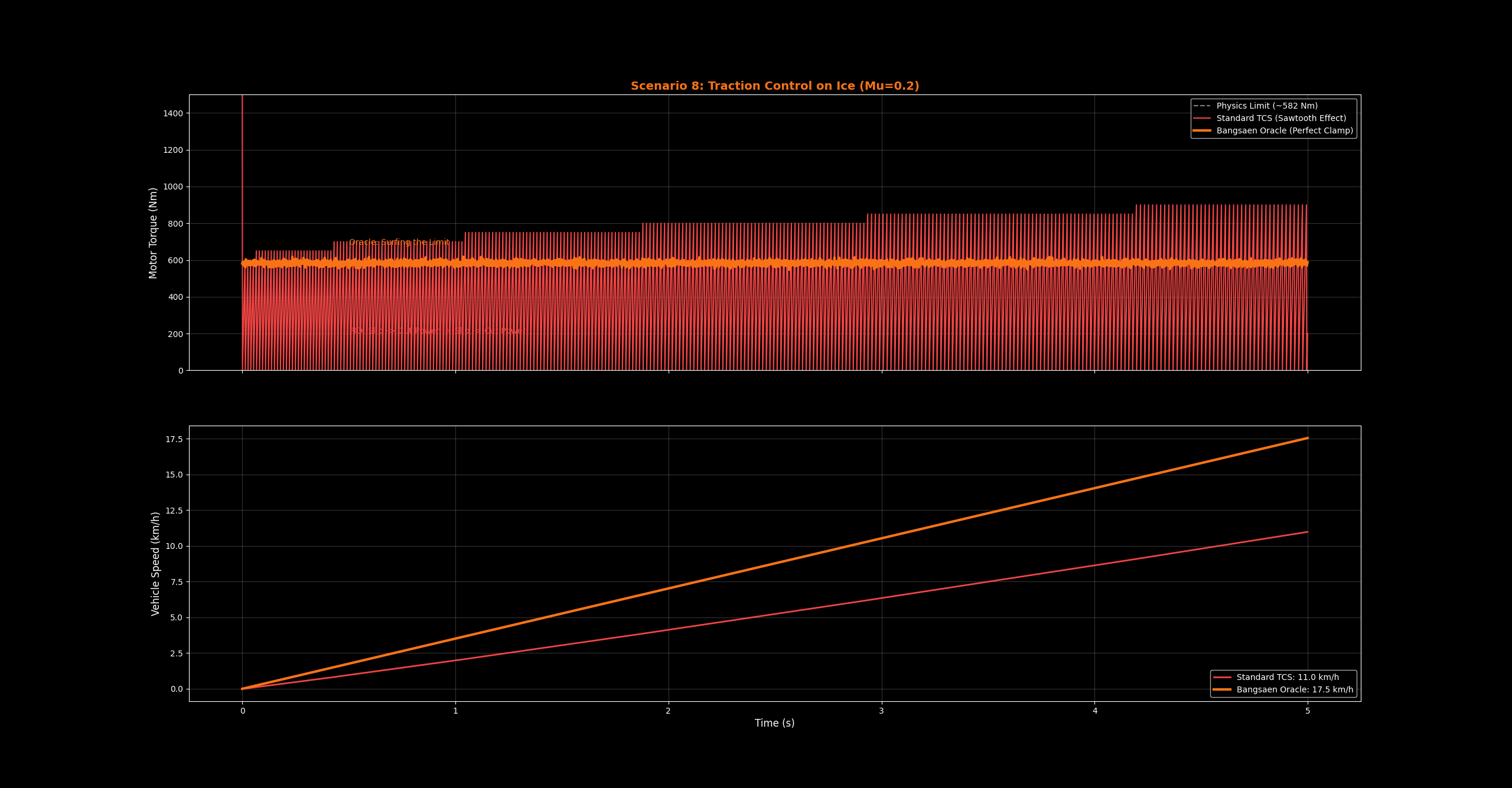
Red (Standard): Violent "Sawtooth" oscillation. Power is cut repeatedly.
Orange (Oracle): Perfect "Flatline" torque delivery. Surfing the physics limit.
"Don't fight the slide. Calculate it. If you know the limit, you can surf it without slipping."
The data speaks for itself. The Standard TCS (Red) struggles to reach 11 km/h, while the Bangsaen Oracle (Orange) hits 17.5 km/h in the same 5-second window on ice. That is a 60% improvement in acceleration simply by replacing the control algorithm.
Launch like a rocket on ice.
Upgrade your EV fleet with Physics-Informed Traction Control today.
Get the Firmware