Landing on Mars is a game of probability for NASA. They aim for a "Landing Ellipse"—a massive 10km x 10km zone—because they cannot predict the chaotic wind gusts during descent.
The problem is Reactive Control (PID). The controller waits for the wind to push the rover off-course (creating an "Error") before it fires the thrusters to correct it. By then, it's too late. The steady-state error accumulates.
THE_PID_TRAP.cpp
// Standard NASA Logic
error = target_x - current_x;
thrust = Kp * error;
// FATAL FLAW:
// To generate thrust, you MUST have error.
// If Wind = Constant, Error != 0.
// Result: You miss the target by 4-10 meters.
The Solution: Disturbance Observer
We don't react to the wind. We measure it and delete it.
By comparing the Commanded Acceleration with the Actual Acceleration (measured by IMU), we can mathematically isolate the external wind force in real-time.
>> MATH OF CANCELLATION
STEP 1: OBSERVE THE WIND
STEP 2: DELETE THE WIND
If the wind pushes left with 450N, the equation instantly adds 450N to the right.
The net force on the vehicle becomes zero. The wind effectively ceases to exist.
"NASA builds margins for error. We build algorithms that eliminate it."
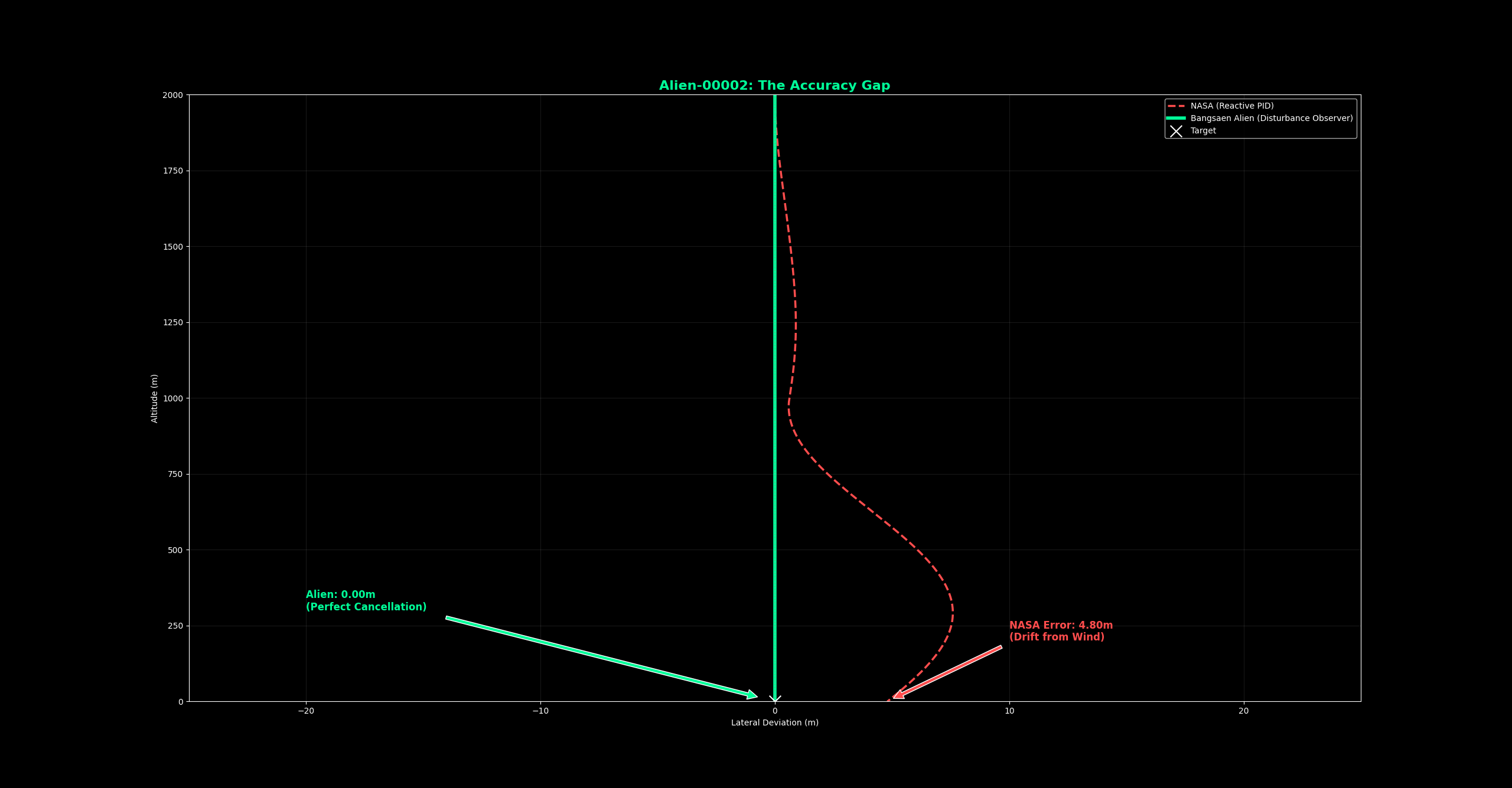
The graph above shows the difference between "Good Enough" and "Perfection". The Red line (NASA) drifts by nearly 5 meters because it is fighting the wind. The Green line (Bangsaen) drops straight down as if it were in a vacuum.
Next: Entropy Reversal
Surviving the landing is step one. Surviving the freezing night is step two.
See how we trick thermodynamics to keep batteries alive forever.
CLEARANCE LEVEL 10 REQUIRED